MYTH
More data always means better ML performance. Teams chase 100k+ datasets while burning budgets and timelines.
REALITY
100 strategically-collected frames outperformed 23,000 standard KITTI frames by 30%
THIS MEANS
99% reduction in data needs, 5x faster development, and predictable ROI for your computer vision projects
The proof
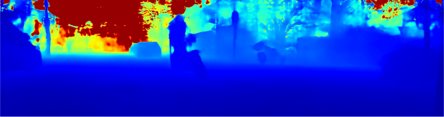
KITTI Dataset Transformation
The “Before” shows a model trained on standard kitty LIDAR data (23k frames). It struggles with long-range perception and has lower resolution. The “After” adds just 100 high-quality frames with precise ground truth, enabling the model to “see to infinity” with much higher detail and accuracy. Small, targeted improvements in data quality can unlock capabilities that were previously impossible.


Unlock the full insights
- Why current autonomous vehicle depth prediction fails in critical scenarios
- New benchmark methodology revealing 20%+ failure rates in leading systems
- Interpretable safety metrics designed specifically for autonomous driving